CNC3018 pro コンピューター制御工作機械を購入しました(組立編)
 安価なCNCコンピュータ制御工作機械(computerized numerical control)を購入しました。
安価なCNCコンピュータ制御工作機械(computerized numerical control)を購入しました。
3Dプリンタは積層(積み上げる)できる形状なら自在に製作できる便利な道具なのですが素材がプラスチックなので耐熱が要求される部品は作れず厚みが2㎜以上ないと十分な強度にできない素材の問題、原理的に既存素材の上に追加積層する事が出来ないので内部構造を丸ごと複製する必要があり「測定→CAD→出力→修正→CAD→出力」を繰り返す事になり対象サイズが大きいと出力に時間が必要で形状や用途によっては構造変更も考える必要があり非常に時間が掛かります。
そこで既存素材を直接加工する工作機械が欲しくなり、始めフライス盤で考えていましたが意外と高額で何とか手が届いたミニサイズCNCを購入しました。
CNCとはコンピュータ制御されたドリル歯が上下・右・左に移動して正確に素材を削る工作機械の事です、切断だけでなく模様を彫り込んだり正確に複数の穴を開けたりする事が可能です、対応素材は木材、アクリル板からアルミ板に対応しておりフレームを強化すればスチール板も加工できます、またドリルを高出力レーザーに付け替えればレーザーカッターや彫刻機になります。
妥協で購入しましたがCNCは3Dプリンタと同じCADで操作できるので良かったのかもしれません。
◆発注して僅か5日で到着しました、さすがEMS便です。
コンパクトな箱にギッシリパーツが詰め込まれており各パーツは形状に合わせてカットされた3段の梱包材に整然と収まっています、多少乱暴に扱われても外箱が破れない限り大丈夫でしょう、ただ日本なら長期保存を考えて除湿剤入れた厚手ビニール袋で包みズレない様にPPバンドで纏めるでしょう。
1段目はフレームとACアダプタ。 2段目はベッドフレームと制御基板、データが入ったUSBメモリ、USBケーブル。
2段目はベッドフレームと制御基板、データが入ったUSBメモリ、USBケーブル。 3段目はモーターヘッドとスライダー・ベアリング、ケーブル、ネジ ステッピングモーター、などの小物が収納されていました。
3段目はモーターヘッドとスライダー・ベアリング、ケーブル、ネジ ステッピングモーター、などの小物が収納されていました。 大きな物は欠けていない印象ですが、組立説明書や部品リストなどの紙書類が一切入っていません。
大きな物は欠けていない印象ですが、組立説明書や部品リストなどの紙書類が一切入っていません。
USBメモリーに「PDFで入っているの?」と確認してみましたが動作ソフトだけでリストも組立説明書も入っていません。
「完成画像を頼りに組み上げろ!」と言う事でしょうか… 海外からの直接購入だとこんな事は日常茶飯事です、対処に自信がない方は国内に問い合わせ先がある販売元からご購入下さい。
仕方ないので同型を販売している海外ショップのマニュアルをダウンロードしましたが、私の購入したキットより古いバージョンらしくパーツリストは参考にならずコントロールボードも違う物で接続方法も違う様です、途中で「ネジが足らない」なんて事はなりたくありませんが手探りで組み上げて行きます。
◆CNC3018 pro の組み立て
まず土台となる、Y軸ベースフレームを組み立てます。
もしパーツの中にワッシャーがある場合はボルトにワッシャーを組み入れます。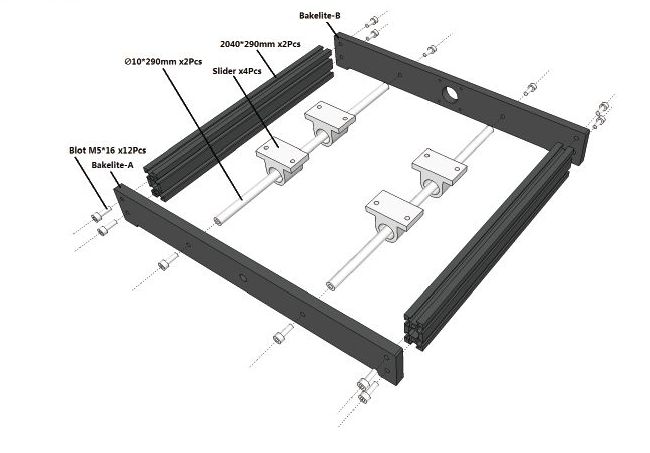 組み立て初めは部品が多く似た形状の部品のどちらを使うのか迷うので、定規かメジャーを用意してマニュアルに書かれているXXXmmを頼りに判別します。
組み立て初めは部品が多く似た形状の部品のどちらを使うのか迷うので、定規かメジャーを用意してマニュアルに書かれているXXXmmを頼りに判別します。  私が購入したキットは後入れナットとフレーム溝のサイズが合っておらず斜め挿入できません、知恵の輪的な挿入方法を試しましたがどうやっても入りません、仕方ないのでマニュアルを先読みして後入れナットを使うパーツは組み上げ前にナットを入れておきます。
私が購入したキットは後入れナットとフレーム溝のサイズが合っておらず斜め挿入できません、知恵の輪的な挿入方法を試しましたがどうやっても入りません、仕方ないのでマニュアルを先読みして後入れナットを使うパーツは組み上げ前にナットを入れておきます。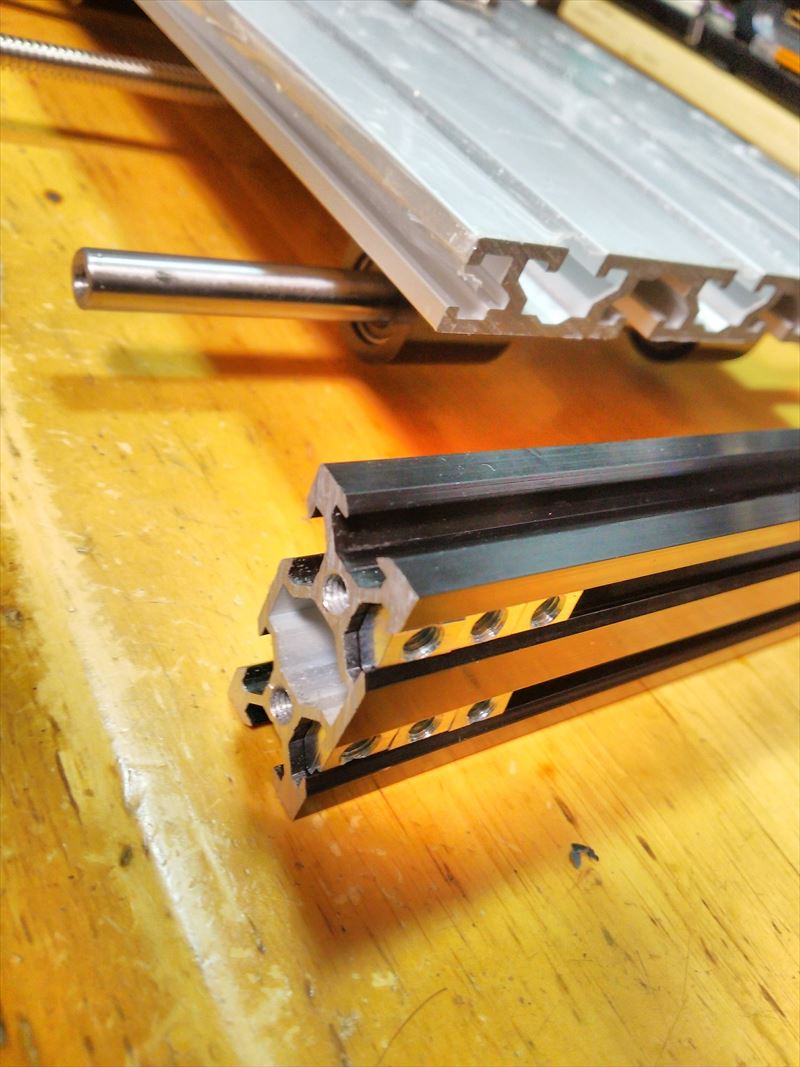 ベッドフレームとステッピングモーターなどを追加します。
ベッドフレームとステッピングモーターなどを追加します。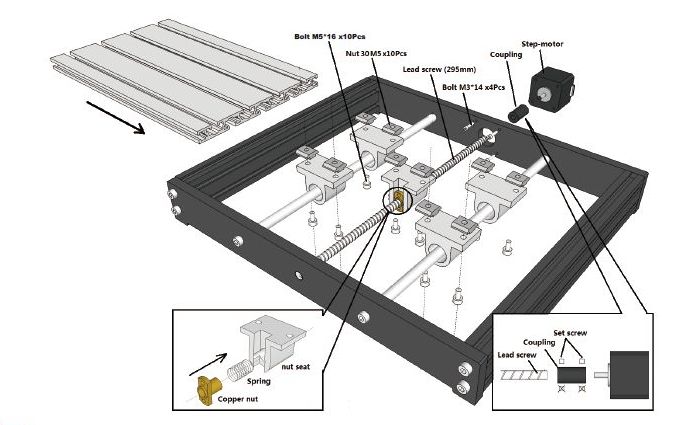 スライダーは方向があります、ベッドフレームとスライダーの間隔を広く取りたい場合はスライダーの方向はこの様になります、可動範囲を最大にしたい場合は逆向きにします。
スライダーは方向があります、ベッドフレームとスライダーの間隔を広く取りたい場合はスライダーの方向はこの様になります、可動範囲を最大にしたい場合は逆向きにします。 ナットシートと銅ナットの組み上げはこの様に、先に銅ナットにスクリューネジを通し押し込みつつねじ込んで行きます。
ナットシートと銅ナットの組み上げはこの様に、先に銅ナットにスクリューネジを通し押し込みつつねじ込んで行きます。 ステッピングモーターが変更されたのか、フレーム凹みが浅くステッピングモーターの凸部と合っていません、そのままねじ込むとフレームに負担がかかるので、パーツリストには記載がないがキットには付属しているワッシャーを使ってかさ上げします。
ステッピングモーターが変更されたのか、フレーム凹みが浅くステッピングモーターの凸部と合っていません、そのままねじ込むとフレームに負担がかかるので、パーツリストには記載がないがキットには付属しているワッシャーを使ってかさ上げします。 ステッピングモーターがまた変更されたら適宜ワッシャーで高さを調整して下さい、取り付けるとカップリングのモーター側止めネジが隠れます、ネジロック剤などで緩まない対策をした方が良いかも知れません。
ステッピングモーターがまた変更されたら適宜ワッシャーで高さを調整して下さい、取り付けるとカップリングのモーター側止めネジが隠れます、ネジロック剤などで緩まない対策をした方が良いかも知れません。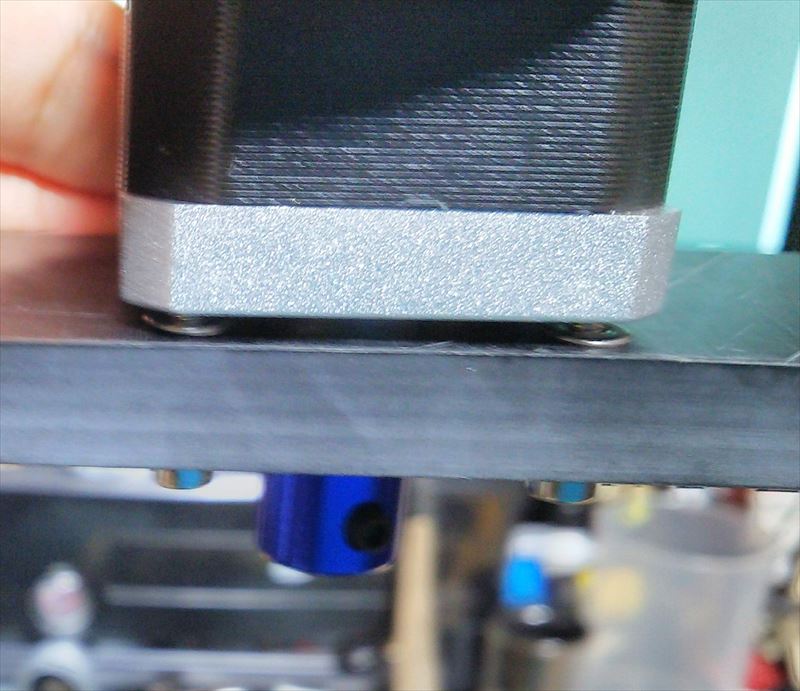 この様になれば次に進みます。
この様になれば次に進みます。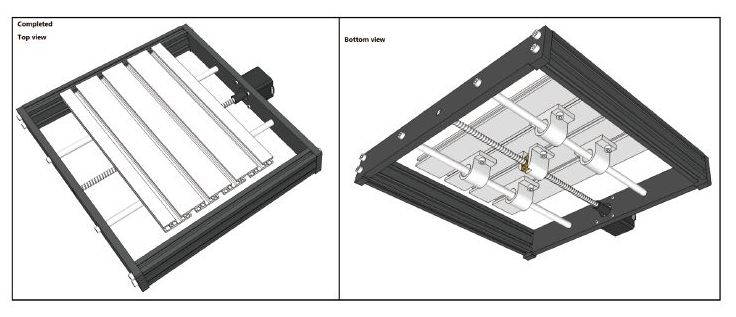
次は、ブラケット(ベアリングが付いてない方)を取り付けます、先にナットを入れていますのでボルトを入れるだけですが、最新キットはサイドブラケットの厚みが増しておりマニュアルの16㎜ではなく22~㎜のボルトを使います。 マニュアルの16㎜のボルトではどう見ても無理ですブラケット厚だけで16㎜はあります。
マニュアルの16㎜のボルトではどう見ても無理ですブラケット厚だけで16㎜はあります。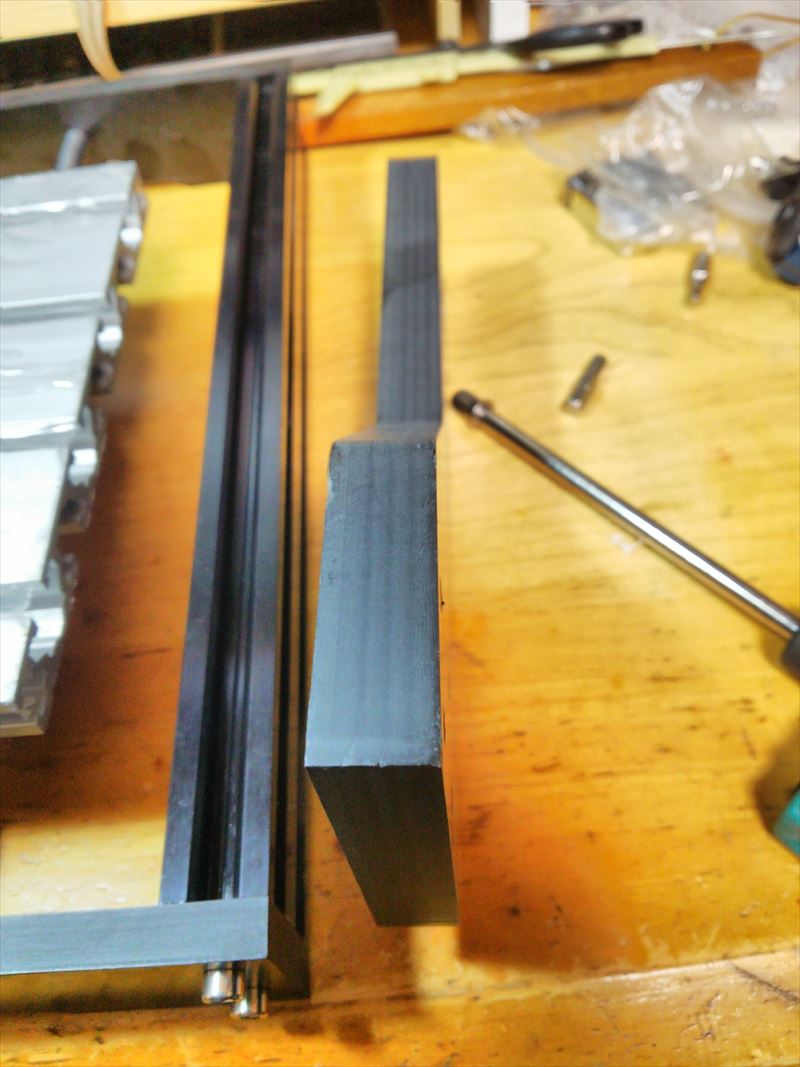 取付位置は、再度フレーム端から46.5mmです、マスキングテープなどを目印にしておけば楽です。
取付位置は、再度フレーム端から46.5mmです、マスキングテープなどを目印にしておけば楽です。 次はヘッドXZ軸パーツを取り付けます。
次はヘッドXZ軸パーツを取り付けます。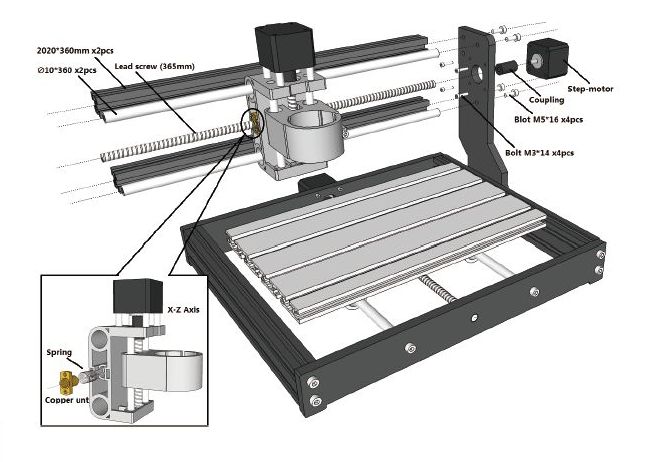 パーツへの負担を考えたら何か保持具を使った方が良いかと思います。(左右別々では無くXZ軸を別途仮組してからベースフレームに結合した方が良いかも知れません)
パーツへの負担を考えたら何か保持具を使った方が良いかと思います。(左右別々では無くXZ軸を別途仮組してからベースフレームに結合した方が良いかも知れません)
ステッピングモーターを固定するネジ(画像ではM3 14mm)の長さがギリギリで食い込みが浅くなります締めすぎるとネジ穴をなめるので注意して下さい、別途M3 20mmを購入した方が良いかも知れません。
コントロールボード固定用の後入れナットを先に入れておきます。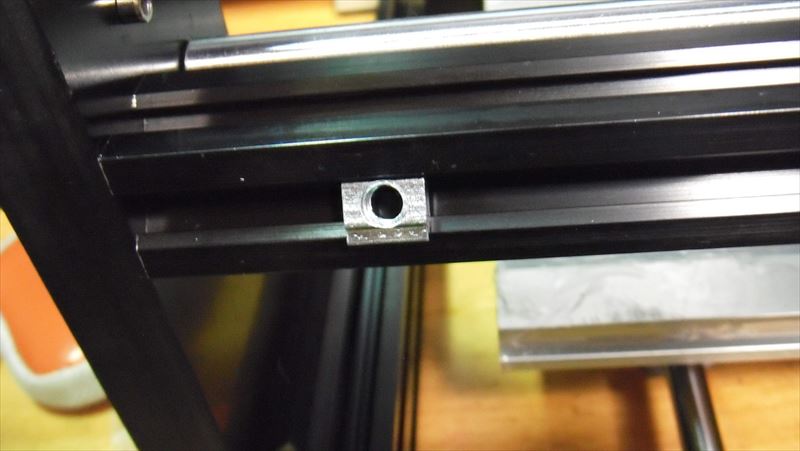 形状的には「後入れナット」なんですがフレームを傷だらけにしても入らないでしょう。
形状的には「後入れナット」なんですがフレームを傷だらけにしても入らないでしょう。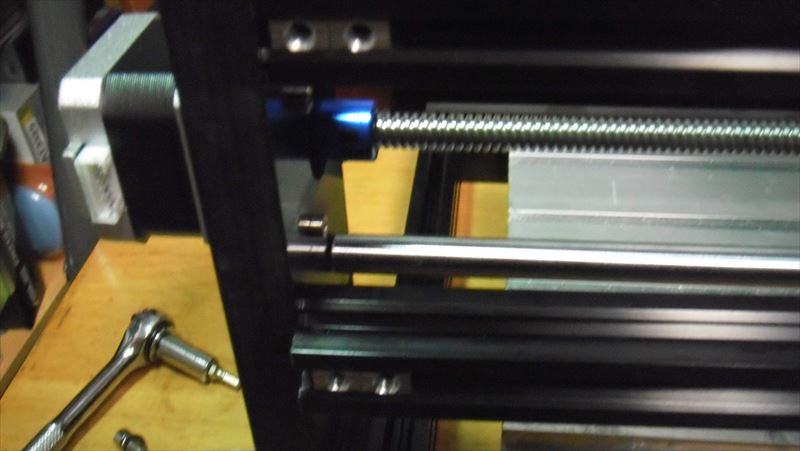 反対側(ベアリングが付いている方)ブラケットを取り付けます。
反対側(ベアリングが付いている方)ブラケットを取り付けます。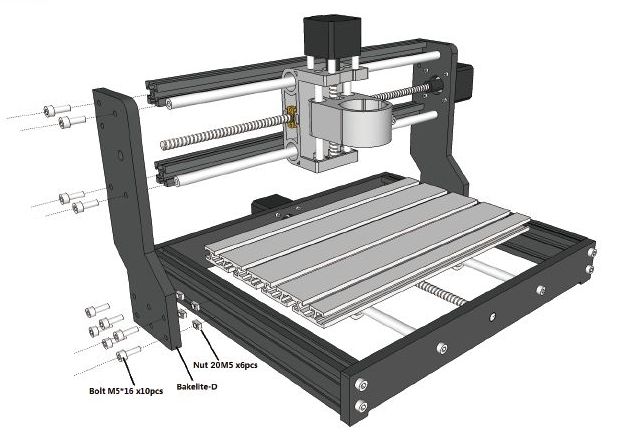 位置は同じ46.5㎜です。
位置は同じ46.5㎜です。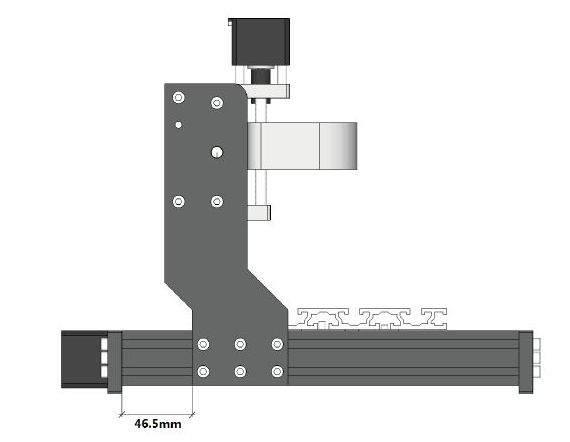 スピンドルモーターが別体になっていた場合は、アッセンブリにはめ込みます。
スピンドルモーターが別体になっていた場合は、アッセンブリにはめ込みます。 強く締め付けると割れるので注意して下さい。
強く締め付けると割れるので注意して下さい。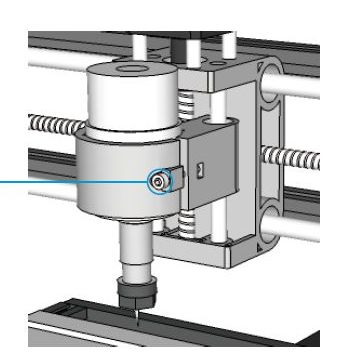 本体の組み立ては完了したので次はコントロールボードの組付けですが、その前にモータードライバーへ付属のチップ部分にヒートシンクを取り付けます、すぐ隣の端子に触れない様に取り付けて下さい。
本体の組み立ては完了したので次はコントロールボードの組付けですが、その前にモータードライバーへ付属のチップ部分にヒートシンクを取り付けます、すぐ隣の端子に触れない様に取り付けて下さい。 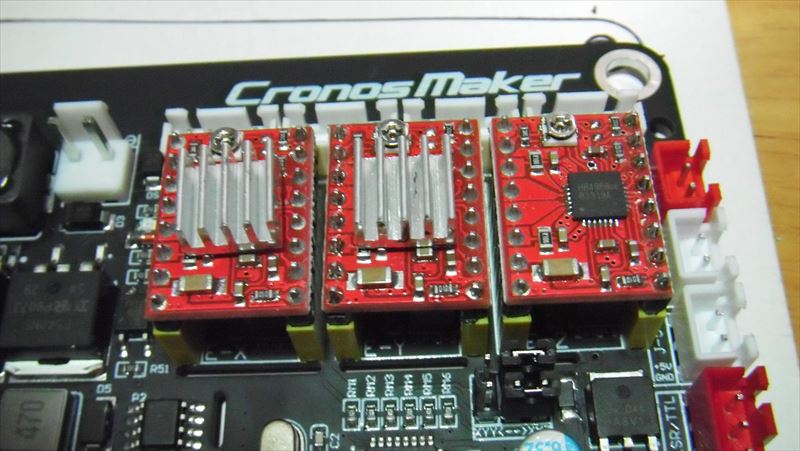 プラスペーサーを挟んでフレームに取り付けます。
プラスペーサーを挟んでフレームに取り付けます。 マニュアル的にはこの取付になっていますが、ボード丸出しだと切粉、削粉まみれになりショートする可能性があります電工用のプルボックスに入れた方が良いかと思います。
マニュアル的にはこの取付になっていますが、ボード丸出しだと切粉、削粉まみれになりショートする可能性があります電工用のプルボックスに入れた方が良いかと思います。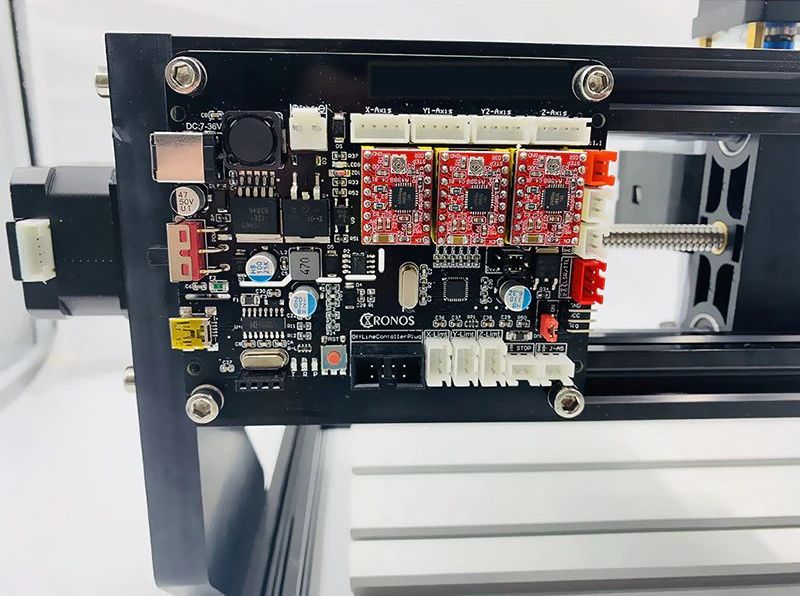 完成するとこんな感じになります。
完成するとこんな感じになります。 次にコントロールボードと各ステッピングモーターをケーブルで接続します。
次にコントロールボードと各ステッピングモーターをケーブルで接続します。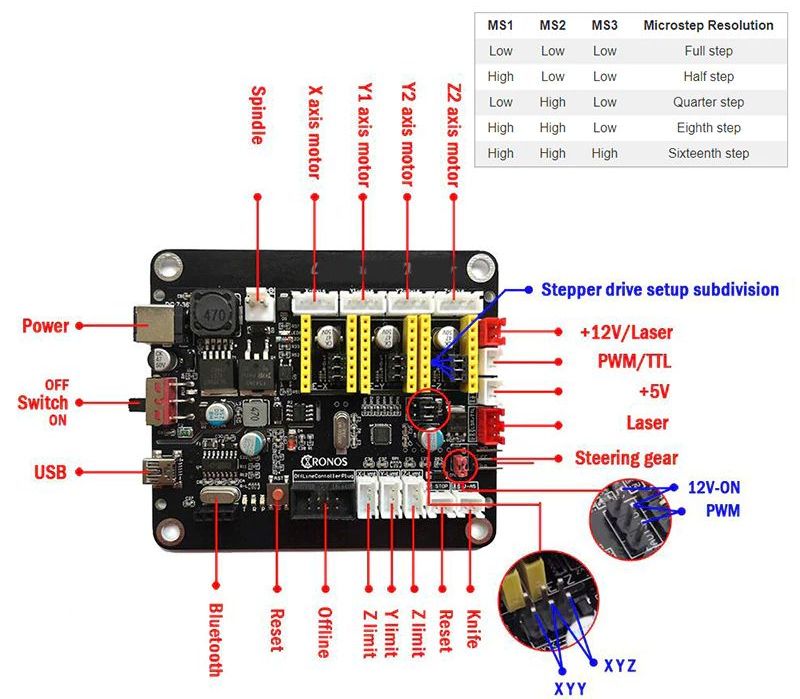 マニュアルと違うのでつなぎ方が不明なのですが…
マニュアルと違うのでつなぎ方が不明なのですが…
本体裏コントロールボード側から見て
X axis Motor:左側にあるステッピングモーターへ
Y1 axis Motor:真ん中手前のステッピングモーターへ
Z2 axis Motor:スピンドルモーター上にあるステッピングモーターへ
Spindle:スピンドルモーターへ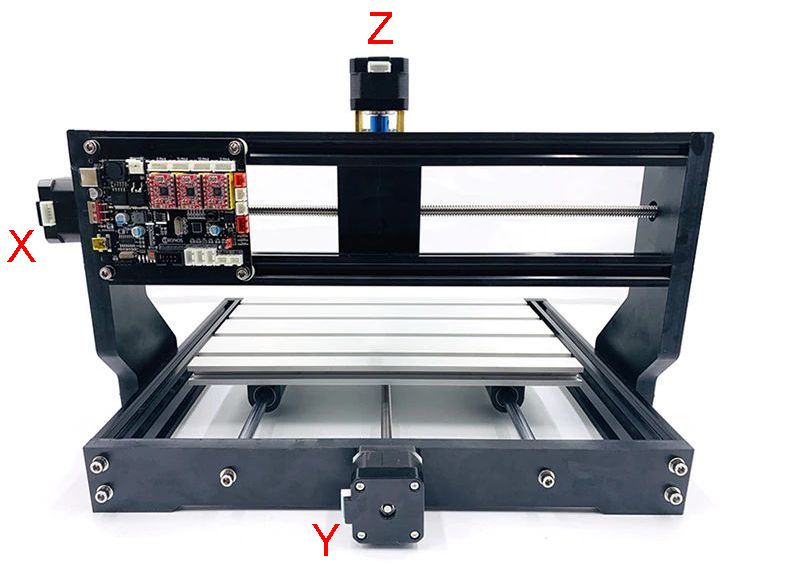 で接続しました。
で接続しました。
全てのステッピングモーターとスピンドルモーターは正常に動作しましたが、X軸のサイドブラケットに微妙なズレがあるのかスピンドルモーターアッセンブリがX軸ステッピングモーター近くに来ると動きが渋くなりステッピングモーターが負荷で止まってしまいます、2本の直線軸と送りねじの平行・垂直が僅かにズレているのでしょう負荷が均一でないと精度に影響しますから修正必須です、現在のカップリングを強度が劣りますがフレキシブルカップリングに変更する必要があるかもしれません。
Y軸の動きは軽いですがベッドフレームで移動限界幅が目視出来ず移動させ過ぎるとスライダーがフレームに接触して緊急ストップ機能が働いてしまいます、コントロールボードには各軸のリミットコネクタがあるのでプルがアップかダウンか分かりませんが3路マイクロスイッチなら使えるでしょうコネクタの形状と結線が3Dプリンターのエンドストップと同じなので流用できるかもしれません。(6個10ドル程度の安い物なのでオプションで用意していたら買ったのに)
Z軸は上下動作が逆転しています、ケーブルの結線を入れ替えるのか?ソフトに設定変更があるのでしょうか?良く分かりませんとりあえず動作する事は確認したので今は放置しておきます。
すんなりとは行きません、参りました…。
3Dプリンターと同じでこの手のキットは組み立てるだけで「すぐ使える」物ではない事は覚悟していましたが、素材を削る時の高負荷に耐える構造にする為なのでしょう3Dプリンターの様なタイミングベルトが使用されていないので誤差を吸収できる物が無いので僅かな歪みで動きが渋くなります、アナログで出せる精度では足りないのでデジタルノギスとレーザー水平器を用意する必要がありそうです。
実用動作にはまだまだ時間が必要な様です。
































後入れナットの向きが表裏逆ですよ(それでは後から入りません)
平べったい方で締めるので、斜めになってる方を奥に滑り込ませる形状です。
段になってる方を手前で、レールの溝に合わせます
溝幅7mmのX字フレームに幅16mm 厚4mmの後入れナットは物理的に入らないと思うんですが。
はじめまして
超初心者なのですが、四苦八苦しながら何とかncdファイルを読み込ませる所まで来ました。が、
私も同じようにZ軸の動きが逆になってしまい手詰まりの状態です、修正方法など教えていただけないでしょうか?
設定を変えれば反転する制御ソフトもある様なのですが、手っ取り早くステッピングモーターの配線を入れ替えました。
コマンドで$$を打つと設定が出ます。$3がモータ反転の設定のようです。$3=0にして反転しなくなればOKです。(自分は初期値$3=5でxとzが反転していました。2進の1ビット=1がz、2ビット=2が(多分y)、3ビット=4がxだと思います。4ビット目でモータかも・・・)。変更した後オフラインコントローラも治ったので基盤に書き込まれたのだと思います。
私も、今、CNC3018proを中国から購入し、取説のない組み立てに苦闘しています。
まずは、わからないのは、大きな台板の2枚ですが、前後を繋ぐのは、どうすればいいのでしょうか?
また、2つの小さなサーボモータが付いて来ましたが、4つのスクリューネジを、台座を通して、モータ側に貫通させる時、固くて、とても、貫通できないのですが(ネジさえも切ってない)、皆様、どうされたでしょうか?
回路側の入出力も、今イチ、どれを何に接続していいのか、分からない状況です。
この3018でも、色々なバージョンがあるような気がして。。。
私の時は、YouTubeで3018を検索して組み立て動画を片っ端から見ましたよ、でも微妙にパーツの形状が違うんでかなり悩みました。